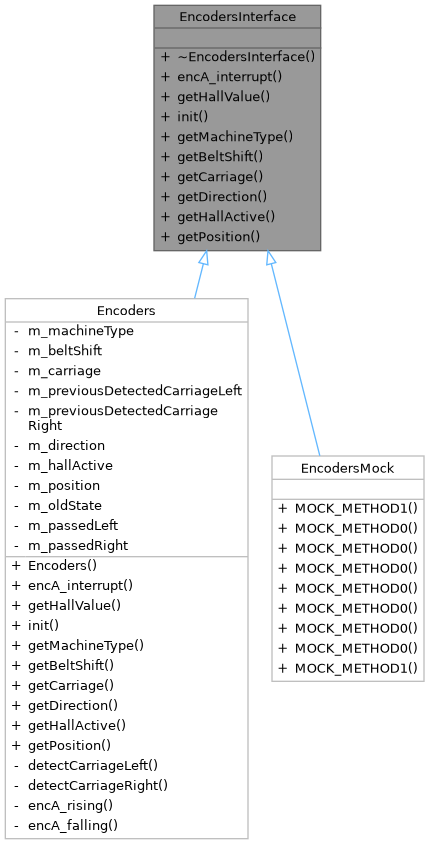
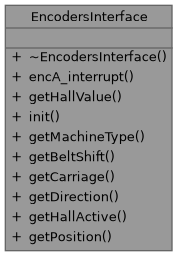
Encoder interface.
More...
#include <encoders.h>
Encoder interface.
Encoders for BeltShift, Direction, Active Hall sensor and Carriage Type.
◆ encA_interrupt()
| virtual void EncodersInterface::encA_interrupt |
( |
| ) |
|
|
pure virtual |
◆ getBeltShift()
| virtual BeltShift_t EncodersInterface::getBeltShift |
( |
| ) |
|
|
pure virtual |
◆ getCarriage()
| virtual Carriage_t EncodersInterface::getCarriage |
( |
| ) |
|
|
pure virtual |
◆ getDirection()
| virtual Direction_t EncodersInterface::getDirection |
( |
| ) |
|
|
pure virtual |
◆ getHallActive()
| virtual Direction_t EncodersInterface::getHallActive |
( |
| ) |
|
|
pure virtual |
◆ getHallValue()
| virtual uint16_t EncodersInterface::getHallValue |
( |
Direction_t |
pSensor | ) |
|
|
pure virtual |
◆ getMachineType()
| virtual Machine_t EncodersInterface::getMachineType |
( |
| ) |
|
|
pure virtual |
◆ getPosition()
| virtual uint8_t EncodersInterface::getPosition |
( |
| ) |
|
|
pure virtual |
◆ init()
| virtual void EncodersInterface::init |
( |
Machine_t |
machineType | ) |
|
|
pure virtual |
The documentation for this class was generated from the following file: