|
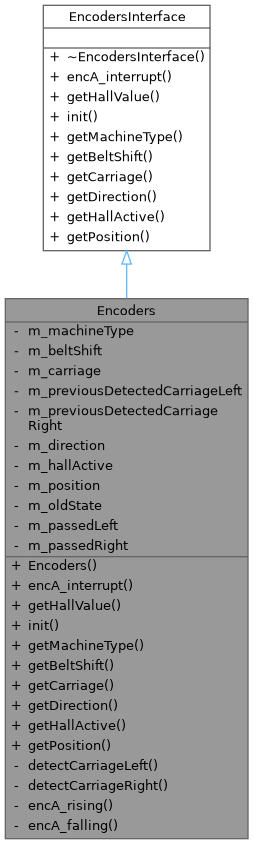
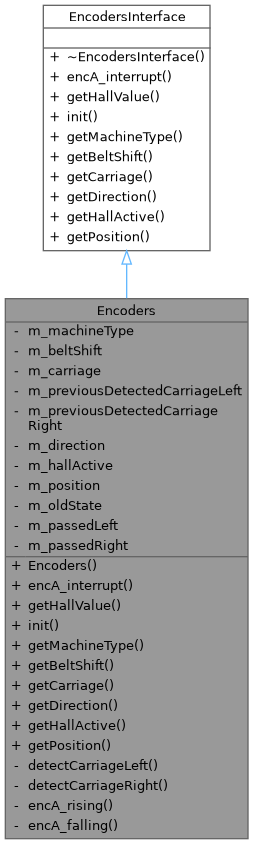
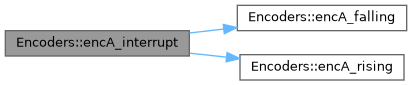
| void | encA_interrupt () final |
| | Service encoder A interrupt routine.
|
| |
| uint16_t | getHallValue (Direction_t pSensor) final |
| | Read hall sensor on left and right.
|
| |
| void | init (Machine_t machineType) final |
| | Initialize machine type.
|
| |
| Machine_t | getMachineType () final |
| | Get machine type.
|
| |
| BeltShift_t | getBeltShift () final |
| | Get beltShift member.
|
| |
| Carriage_t | getCarriage () final |
| | Get carriage member.
|
| |
| Direction_t | getDirection () final |
| | Get direction member.
|
| |
| Direction_t | getHallActive () final |
| | Get hallActive member.
|
| |
| uint8_t | getPosition () final |
| | Get position member.
|
| |
|
|
Carriage_t | detectCarriageLeft () |
| |
|
Carriage_t | detectCarriageRight () |
| |
| void | encA_rising () |
| | Interrupt service subroutine.
|
| |
| void | encA_falling () |
| | Interrupt service subroutine.
|
| |
|
|
Machine_t | m_machineType |
| |
|
volatile BeltShift_t | m_beltShift |
| |
|
volatile Carriage_t | m_carriage |
| |
|
volatile Carriage_t | m_previousDetectedCarriageLeft |
| |
|
volatile Carriage_t | m_previousDetectedCarriageRight |
| |
|
volatile Direction_t | m_direction |
| |
|
volatile Direction_t | m_hallActive |
| |
|
volatile uint8_t | m_position |
| |
|
volatile bool | m_oldState |
| |
|
volatile bool | m_passedLeft |
| |
|
volatile bool | m_passedRight |
| |
◆ encA_falling()
| void Encoders::encA_falling |
( |
| ) |
|
|
private |
Interrupt service subroutine.
Called when encoder pin A is falling. Must execute as fast as possible. Bounds on m_machineType not checked.
◆ encA_interrupt()
| void Encoders::encA_interrupt |
( |
| ) |
|
|
finalvirtual |
◆ encA_rising()
| void Encoders::encA_rising |
( |
| ) |
|
|
private |
Interrupt service subroutine.
Called when encoder pin A is rising. Must execute as fast as possible. Bounds on m_machineType not checked.
◆ getBeltShift()
| BeltShift_t Encoders::getBeltShift |
( |
| ) |
|
|
finalvirtual |
◆ getCarriage()
| Carriage_t Encoders::getCarriage |
( |
| ) |
|
|
finalvirtual |
◆ getDirection()
| Direction_t Encoders::getDirection |
( |
| ) |
|
|
finalvirtual |
◆ getHallActive()
| Direction_t Encoders::getHallActive |
( |
| ) |
|
|
finalvirtual |
◆ getHallValue()
| uint16_t Encoders::getHallValue |
( |
Direction_t |
pSensor | ) |
|
|
finalvirtual |
Read hall sensor on left and right.
- Parameters
-
| pSensor | Which sensor to read (left or right). |
Implements EncodersInterface.
◆ getMachineType()
| Machine_t Encoders::getMachineType |
( |
| ) |
|
|
finalvirtual |
◆ getPosition()
| uint8_t Encoders::getPosition |
( |
| ) |
|
|
finalvirtual |
◆ init()
| void Encoders::init |
( |
Machine_t |
machineType | ) |
|
|
finalvirtual |
The documentation for this class was generated from the following files: