|
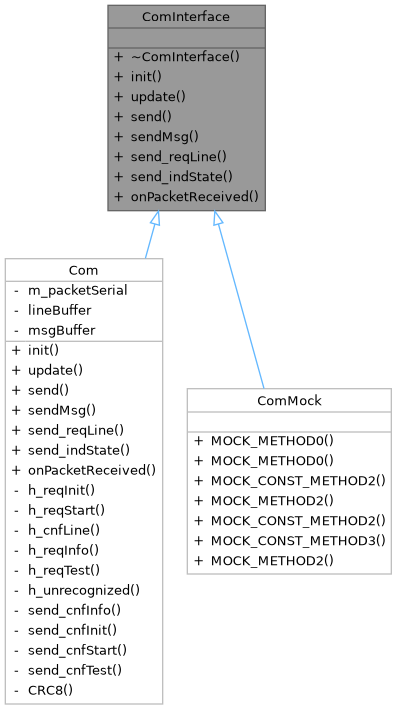
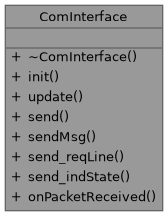
| virtual void | init ()=0 |
| |
| virtual void | update ()=0 |
| |
| virtual void | send (uint8_t *payload, size_t length) const =0 |
| |
| virtual void | sendMsg (AYAB_API_t id, const char *msg)=0 |
| |
| virtual void | send_reqLine (const uint8_t lineNumber, Err_t error=ErrorCode::success) const =0 |
| |
| virtual void | send_indState (Carriage_t carriage, uint8_t position, Err_t error=ErrorCode::success) const =0 |
| |
| virtual void | onPacketReceived (const uint8_t *buffer, size_t size)=0 |
| |
◆ init()
| virtual void ComInterface::init |
( |
| ) |
|
|
pure virtual |
◆ onPacketReceived()
| virtual void ComInterface::onPacketReceived |
( |
const uint8_t * |
buffer, |
|
|
size_t |
size |
|
) |
| |
|
pure virtual |
◆ send()
| virtual void ComInterface::send |
( |
uint8_t * |
payload, |
|
|
size_t |
length |
|
) |
| const |
|
pure virtual |
◆ send_indState()
| virtual void ComInterface::send_indState |
( |
Carriage_t |
carriage, |
|
|
uint8_t |
position, |
|
|
Err_t |
error = ErrorCode::success |
|
) |
| const |
|
pure virtual |
◆ send_reqLine()
| virtual void ComInterface::send_reqLine |
( |
const uint8_t |
lineNumber, |
|
|
Err_t |
error = ErrorCode::success |
|
) |
| const |
|
pure virtual |
◆ sendMsg()
| virtual void ComInterface::sendMsg |
( |
AYAB_API_t |
id, |
|
|
const char * |
msg |
|
) |
| |
|
pure virtual |
◆ update()
| virtual void ComInterface::update |
( |
| ) |
|
|
pure virtual |
The documentation for this class was generated from the following file: