|
AYAB Arduino Firmware 0.95
The goal of the AYAB project is to provide an alternative way to control the famous Brother KH-9xx range of knitting machines using a computer
|
|
AYAB Arduino Firmware 0.95
The goal of the AYAB project is to provide an alternative way to control the famous Brother KH-9xx range of knitting machines using a computer
|


Public Member Functions | |
| Err_t | startTest (Machine_t machineType) final |
| Start hardware test. | |
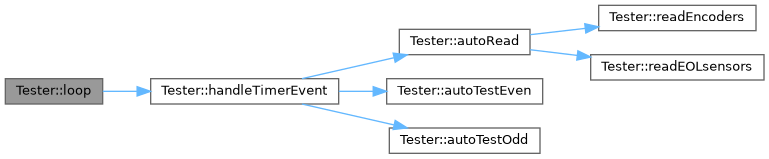
| void | loop () final |
| Main loop for hardware tests. | |
| void | helpCmd () final |
| Help command handler. | |
| void | sendCmd () final |
| Send command handler. | |
| void | beepCmd () final |
| Beep command handler. | |
| void | setSingleCmd (const uint8_t *buffer, size_t size) final |
| Set single solenoid command handler. | |
| void | setAllCmd (const uint8_t *buffer, size_t size) final |
| Set all solenoids command handler. | |
| void | readEOLsensorsCmd () final |
| Read EOL sensors command handler. | |
| void | readEncodersCmd () final |
| Read encoders command handler. | |
| void | autoReadCmd () final |
| Auto read command handler. | |
| void | autoTestCmd () final |
| Auto test command handler. | |
| void | stopCmd () final |
| Stop command handler. | |
| void | quitCmd () final |
| Quit command handler. | |
| void | encoderChange () final |
| Interrupt service routine for encoder A. | |
Private Attributes | |
| bool | m_autoReadOn = false |
| bool | m_autoTestOn = false |
| unsigned long | m_lastTime = 0U |
| bool | m_timerEventOdd = false |
| char | buf [BUFFER_LEN] = {0} |
|
finalvirtual |
Auto read command handler.
Implements TesterInterface.
|
finalvirtual |
Auto test command handler.
Implements TesterInterface.
|
finalvirtual |
Beep command handler.
Implements TesterInterface.
References beep().

|
finalvirtual |
Interrupt service routine for encoder A.
Reimplemented from TesterInterface.
|
finalvirtual |
|
finalvirtual |
Main loop for hardware tests.
Implements TesterInterface.
References handleTimerEvent().
|
finalvirtual |
Quit command handler.
Implements TesterInterface.
|
finalvirtual |
Read encoders command handler.
Implements TesterInterface.
References readEncoders().

|
finalvirtual |
Read EOL sensors command handler.
Implements TesterInterface.
References readEOLsensors().

|
finalvirtual |
Send command handler.
Implements TesterInterface.
|
finalvirtual |
Set all solenoids command handler.
| buffer | Pointer to a data buffer. |
| size | Number of bytes of data in the buffer. |
Implements TesterInterface.
|
finalvirtual |
Set single solenoid command handler.
| buffer | Pointer to a data buffer. |
| size | Number of bytes of data in the buffer. |
Implements TesterInterface.
|
finalvirtual |
Start hardware test.
| machineType | Machine type. |
Implements TesterInterface.
References setUp().

|
finalvirtual |
Stop command handler.
Implements TesterInterface.
