|
AYAB Arduino Firmware 0.95
The goal of the AYAB project is to provide an alternative way to control the famous Brother KH-9xx range of knitting machines using a computer
|
|
AYAB Arduino Firmware 0.95
The goal of the AYAB project is to provide an alternative way to control the famous Brother KH-9xx range of knitting machines using a computer
|
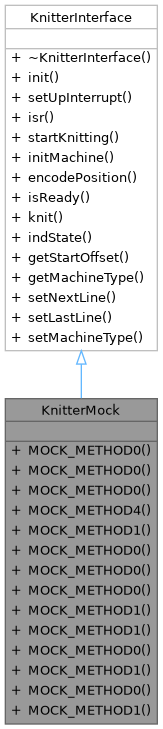
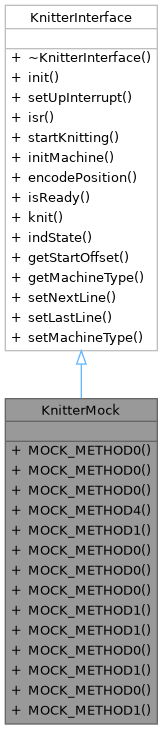
Public Member Functions | |
| MOCK_METHOD0 (init, void()) | |
| MOCK_METHOD0 (setUpInterrupt, void()) | |
| MOCK_METHOD0 (isr, void()) | |
| MOCK_METHOD4 (startKnitting, Err_t(uint8_t startNeedle, uint8_t stopNeedle, uint8_t *pattern_start, bool continuousReportingEnabled)) | |
| MOCK_METHOD1 (initMachine, Err_t(Machine_t machineType)) | |
| MOCK_METHOD0 (encodePosition, void()) | |
| MOCK_METHOD0 (isReady, bool()) | |
| MOCK_METHOD0 (knit, void()) | |
| MOCK_METHOD1 (indState, void(Err_t error)) | |
| MOCK_METHOD1 (getStartOffset, uint8_t(const Direction_t direction)) | |
| MOCK_METHOD0 (getMachineType, Machine_t()) | |
| MOCK_METHOD1 (setNextLine, bool(uint8_t lineNumber)) | |
| MOCK_METHOD0 (setLastLine, void()) | |
| MOCK_METHOD1 (setMachineType, void(Machine_t)) | |
 Public Member Functions inherited from KnitterInterface Public Member Functions inherited from KnitterInterface | |
| virtual void | init ()=0 |
| virtual void | setUpInterrupt ()=0 |
| virtual void | isr ()=0 |
| virtual Err_t | startKnitting (uint8_t startNeedle, uint8_t stopNeedle, uint8_t *pattern_start, bool continuousReportingEnabled)=0 |
| virtual Err_t | initMachine (Machine_t machine)=0 |
| virtual void | encodePosition ()=0 |
| virtual bool | isReady ()=0 |
| virtual void | knit ()=0 |
| virtual void | indState (Err_t error=ErrorCode::success)=0 |
| virtual uint8_t | getStartOffset (const Direction_t direction)=0 |
| virtual Machine_t | getMachineType ()=0 |
| virtual bool | setNextLine (uint8_t lineNumber)=0 |
| virtual void | setLastLine ()=0 |
| virtual void | setMachineType (Machine_t)=0 |