|
AYAB Arduino Firmware 0.95
The goal of the AYAB project is to provide an alternative way to control the famous Brother KH-9xx range of knitting machines using a computer
|
|
AYAB Arduino Firmware 0.95
The goal of the AYAB project is to provide an alternative way to control the famous Brother KH-9xx range of knitting machines using a computer
|
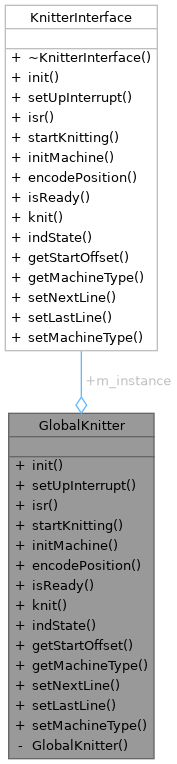
Static Public Attributes | |
| static KnitterInterface * | m_instance = &_Knitter |