|
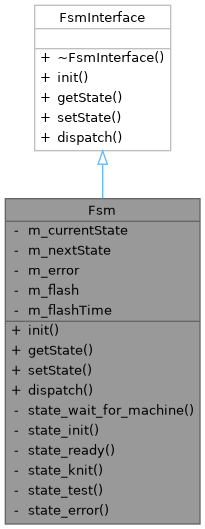
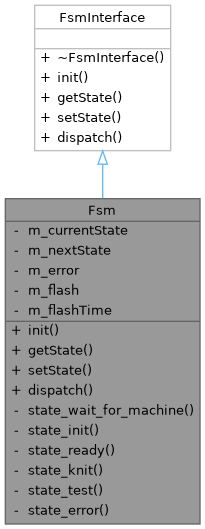
| void | init () final |
| | Initialize Finite State Machine.
|
| |
| OpState_t | getState () final |
| | Get machine state.
|
| |
| void | setState (OpState_t state) final |
| | Set machine state.
|
| |
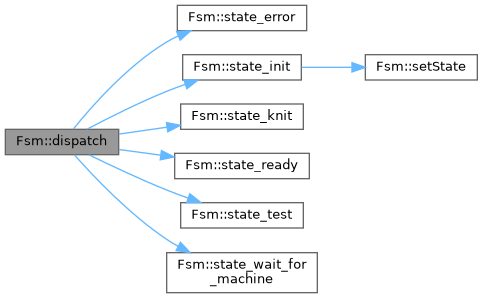
| void | dispatch () final |
| | Dispatch on machine state.
|
| |
|
|
void | state_wait_for_machine () const |
| | Action of machine in state wait_for_machine.
|
| |
|
void | state_init () |
| | Action of machine in state OpState::init.
|
| |
|
void | state_ready () const |
| | Action of machine in state OpState::ready.
|
| |
|
void | state_knit () const |
| | Action of machine in state OpState::knit.
|
| |
|
void | state_test () const |
| | Action of machine in state OpState::test.
|
| |
|
void | state_error () |
| | Action of machine in state OpState::error.
|
| |
|
|
OpState_t | m_currentState |
| |
|
OpState_t | m_nextState |
| |
|
Err_t | m_error |
| |
|
bool | m_flash |
| |
|
unsigned long | m_flashTime |
| |
◆ dispatch()
◆ getState()
| OpState_t Fsm::getState |
( |
| ) |
|
|
finalvirtual |
Get machine state.
- Returns
- Current state of Finite State Machine.
Implements FsmInterface.
◆ init()
◆ setState()
| void Fsm::setState |
( |
OpState_t |
state | ) |
|
|
finalvirtual |
The documentation for this class was generated from the following files: